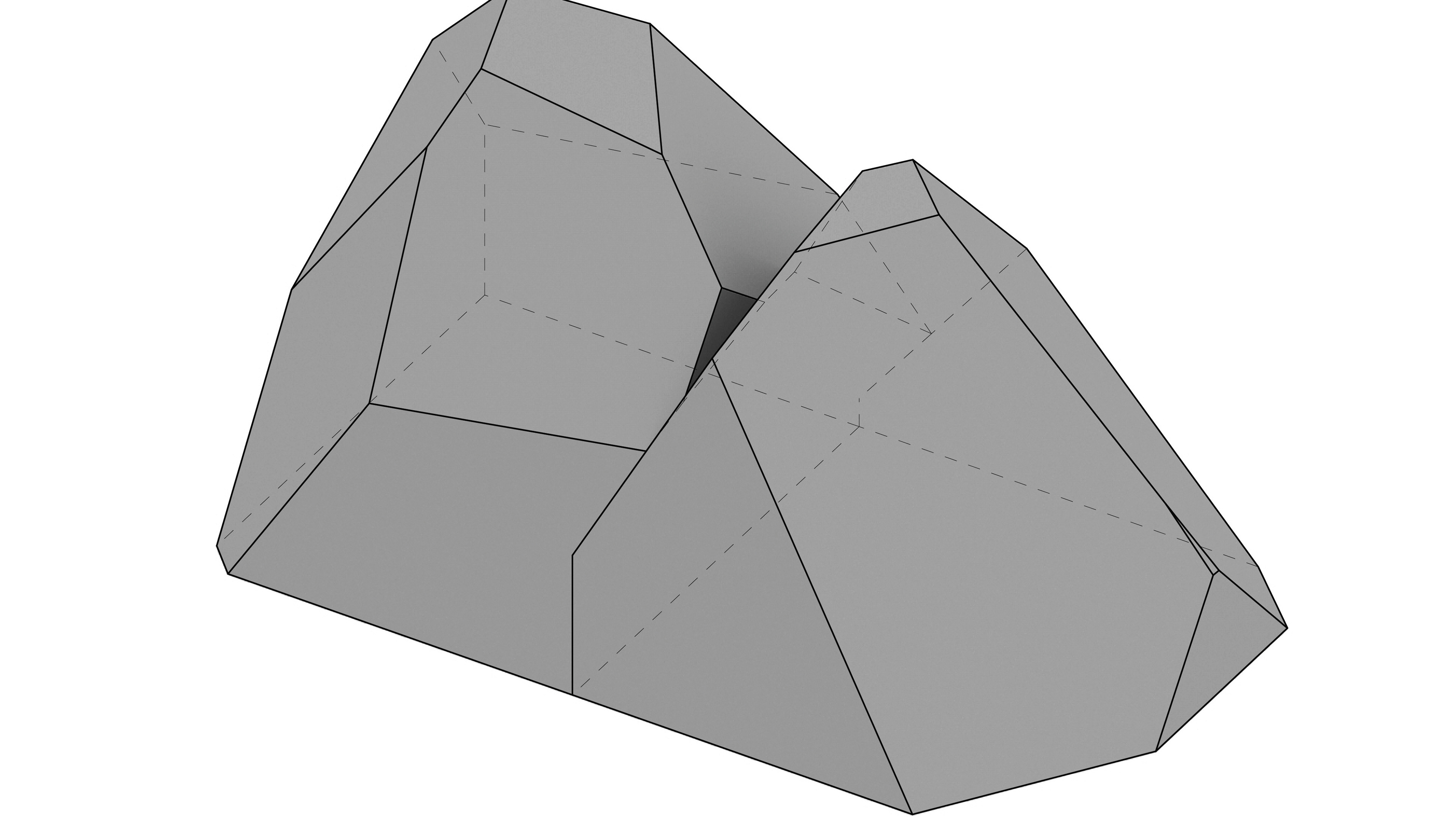
The project involved Grasshopper, Rhino, and a robot. By using Grasshopper to program the robot, a simulation of the robot was available on Rhino. The robot has a hot wire attachment to its arm. Four simulated cuts are made on a cube to create a new shape. In Grasshopper, the robot’s movement are able to be preset and the simulation verified that the robot arm would not hit the robot or stand. Due to COVID, the project is not able to be physically made.

Grasshopper Cutting Plans
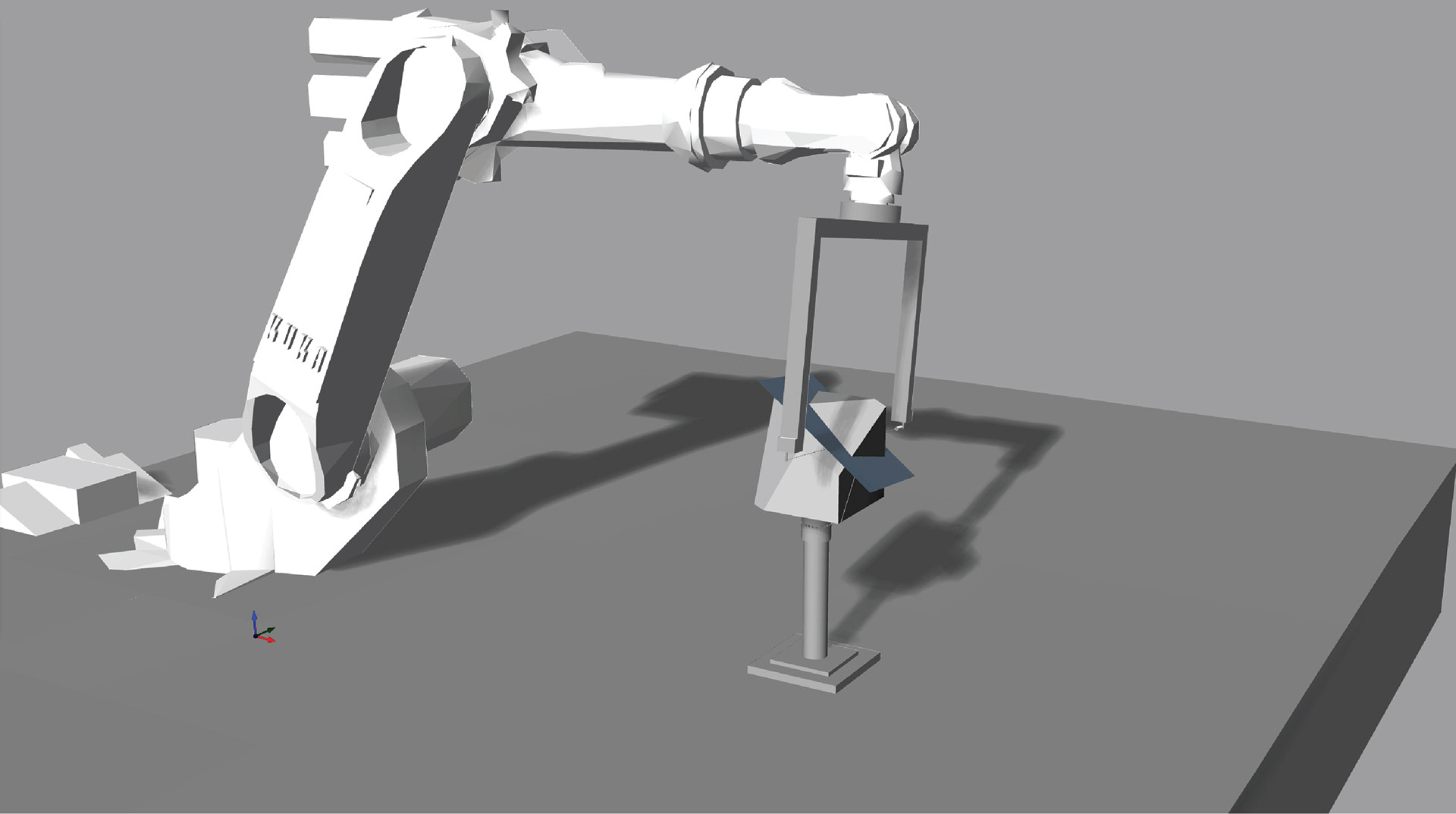
Grasshopper Simulation
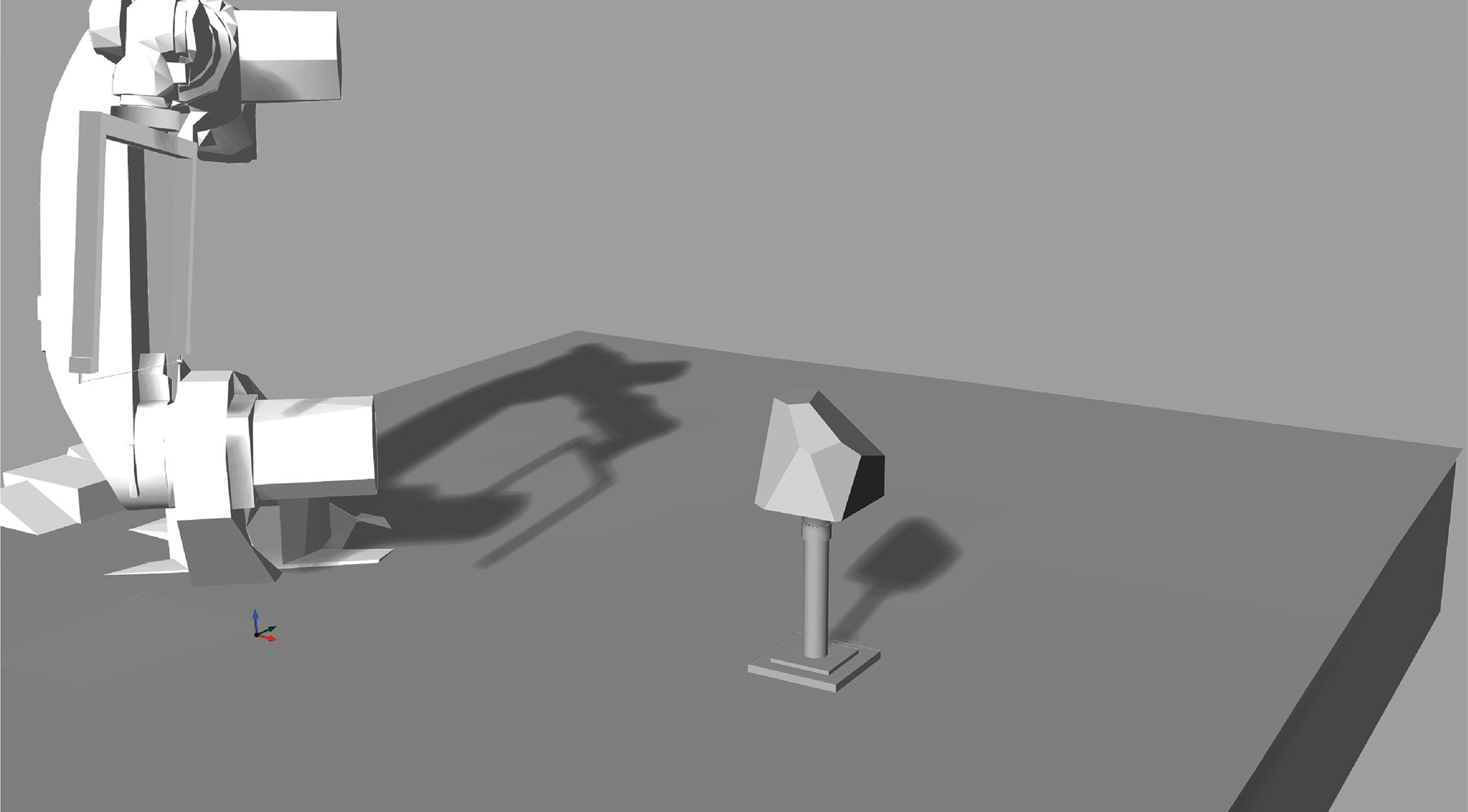
Grasshopper Simulation
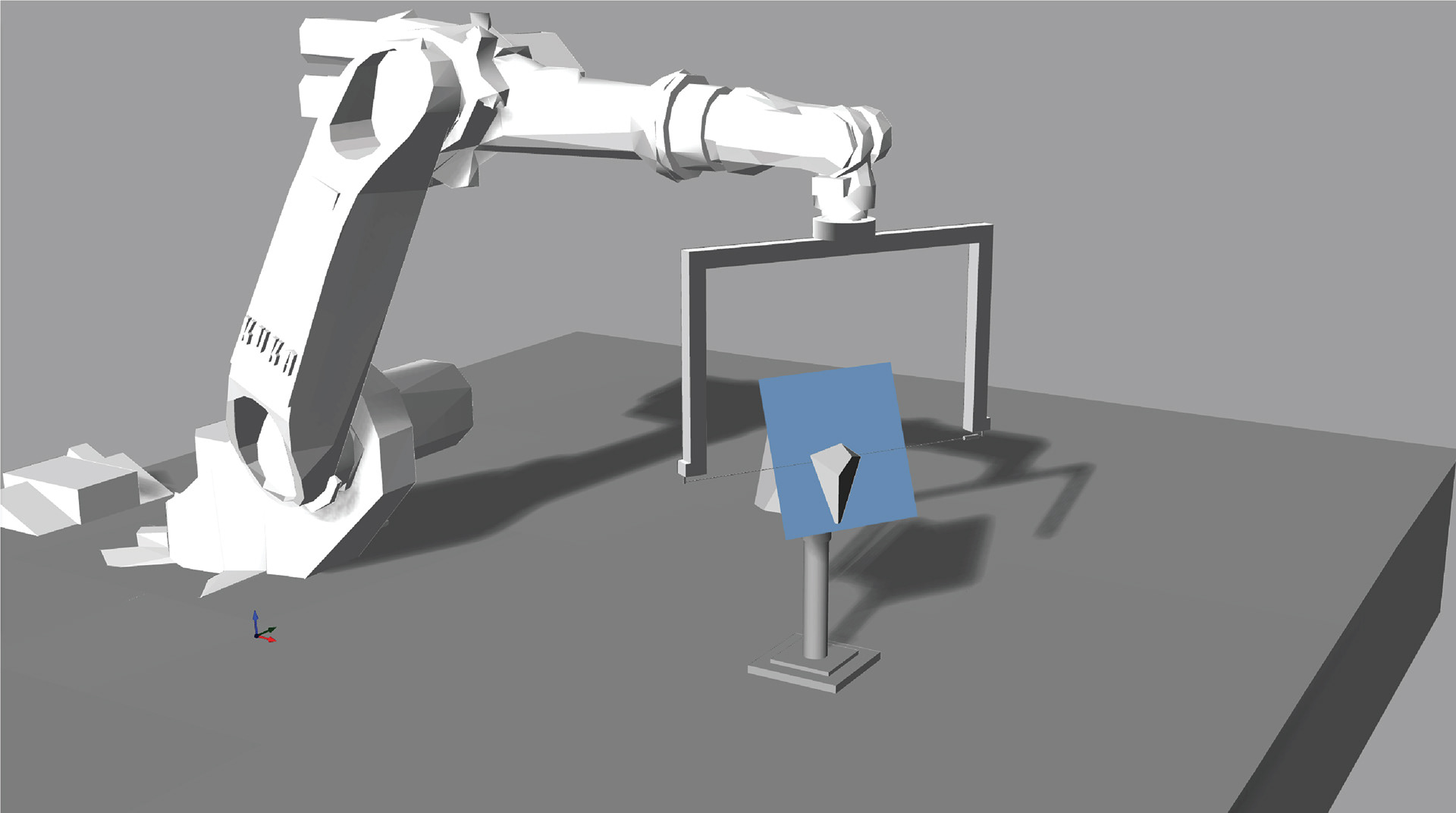
Grasshopper Simulation